 综合资讯
综合资讯 企业资讯
企业资讯 泵阀机电
泵阀机电 机械设备
机械设备 仪器仪表
仪器仪表 钢铁冶金
钢铁冶金 五金家电
五金家电 家居建材
家居建材 水利环保
水利环保 石油化工
石油化工 食品酿造
食品酿造 农林牧渔
农林牧渔 服饰穿戴
服饰穿戴 招商加盟
招商加盟 产经新闻
产经新闻 财经资讯
财经资讯 楼市房产
楼市房产 旅游频道
旅游频道 汽车频道
汽车频道 餐饮美食
餐饮美食 医美健康
医美健康 文化教育
文化教育 品牌人物
品牌人物 热搜资讯
热搜资讯 智能科技
智能科技 营销电商
营销电商 展会报道
展会报道
从“养虾热”到实体交互:元萝卜推动openclaw走向真实世界
2026-03-18 14:59:31 sunmedia 1239
近期,openclaw开源项目在全网掀起现象级热潮,“养龙虾”式的创新ai交互玩法快速破圈,点燃了开发者与科技爱好者的热情。
从目前的发展情况来看,围绕openclaw的探索,仍主要集中在数字世界,例如文档处理、数据整理等典型任务。而能够延伸至真实物理环境、完成实体交互的产品,仍然较为少见。
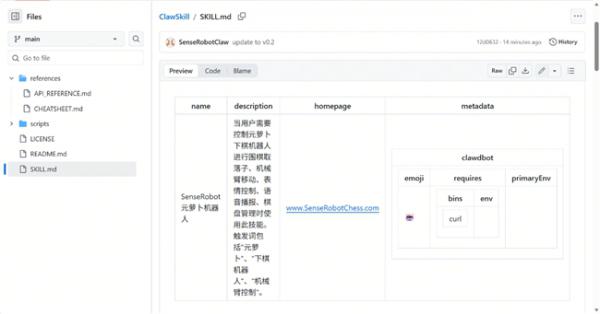
在这样的背景下,具备“实体交互”能力的产品开始受到关注。其中,商汤科技旗下的元萝卜,因开放了openclaw skill接口,被开发者尝试用于探索ai在真实世界中的执行能力。
github:https://github.com/senserobotclaw/clawskill
clawhub:https://clawhub.ai/senserobotclawbot/senserobot
依托其视觉感知与实体交互能力,元萝卜被部分业内人士视为少数同时实现量产落地、并具备实体交互能力的代表性产品之一。这也让业内开始重新审视元萝卜的角色——它是否有机会从“下棋机器人”,延展为更具通用能力的“桌面智能体”。
在前几日举办的2026年中国家电及消费电子博览会(awe)期间,结合openclaw的设想,已经勾勒出元萝卜潜在的路径可能:通过简单指令驱动机械臂完成抓取、摆放,甚至让棋子组合成特定图形。除此之外,还有机会进一步延展至桌面自动化、互动展示或ai实验等场景,使ai从“生成内容”走向“参与动作”,改变物理世界,让用户的奇思妙想得以实现。

突破虚拟与现实壁垒,视觉感知 机械臂让openclaw落地桌面场景
当前,大模型能力快速飞跃、智能体功能不断进化,但绝大多数ai应用仍局限于屏幕内的虚拟交互,难以与真实物理世界开展交互。
元萝卜恰好具备实现物理世界交互的基础——依托商汤科技在计算机视觉领域的深厚积累,通过高精度摄像头与ai算法的配合,它能够实时感知桌面环境、识别物体位置、判断空间关系,做出智能决策,并引导机械臂安全完成实体交互。
这使得openclaw与元萝卜的结合与多数仍停留在屏幕内的ai应用不同:虚拟指令能够转化为真实动作,实现从“指令-感知-决策-执行”的完整闭环。借助元萝卜成熟的硬件能力,ai可以从识别物体位置,到完成抓取和摆放,真正从“虚拟交互”跨越到“物理执行”。这使元萝卜在openclaw生态中成为可执行实体动作的家用终端,为展示ai在真实物理环境中的应用提供了实例。
从“专用”到“通用”,“ai下棋机器人”进化为“桌面智能体”
此次与openclaw的深度融合,展现了元萝卜从“会下棋的机器人”向“桌面智能体”进化的潜力。
开发者、学生、创客以及科技爱好者可利用openclaw的自然语言交互能力,探索元萝卜在真实环境中的操作可能,在下棋功能之外,还有教育、编程、创客项目、ai实验或互动展示等场景。这条“开发者主导、生态驱动”的探索路径,为家用ai设备的应用边界提供了新的参考。

未来,随着机器人走向更多应用场景,以及开源生态的不断完善,ai智能体将进一步打破虚拟与现实的边界,从屏幕走向更广阔的真实物理场景。而像元萝卜下棋机器人这样的消费级家用终端,作为ai能力触达普通用户的载体,也将在开源生态的支撑下,解锁更多元的应用场景,带来兼具温度与想象力的智能体验。
商媒在线
下一篇:
免责声明:商媒在线所提供的信息及图片除原创外,有部分资讯和图片从网络等媒体收集而来,凯发平台的版权归原作者及媒体网站所有,商媒在线力求保存原有的凯发平台的版权信息并尽可能注明来源;部分因为操作上的原因可能已将原有信息丢失,敬请原作者谅解,如果您对商媒在线所载文章及图片凯发平台的版权的归属存有异议,请立即通知商媒在线,商媒在线将立即予以删除,同时向您表示歉意!
相关推荐
最新资讯

管道改造遇难题,万能阀门来助力 d71f中线蝶阀让供水系统焕然一新
04-06
195

紧急抢修,万能阀门连夜排产 fj41y节流截止放空阀解客户燃眉之急
04-06
589

高压工况迎刃而解,上海巧旭磁力泵的实战答卷
04-06
293

高温产线告别“跑冒滴漏”,一台定制磁力泵的逆袭之路
04-06
678
黄山良业终身名誉董事长项美根先生自传《回眸八十春》获中英双语出版
04-03
880
舒铂安全月·宁波艺星|术式破局,共筑高难鼻修复“安全防线”
04-02
524

万能阀门:化解化工管线腐蚀顽疾 d71f46衬氟蝶阀交付纪事
03-28
1025

万能阀门:解油田高温高压难题 z43y/zf43y选型服务纪实
03-28
1434

上海巧旭高压磁力泵定制案例解析 服务谦和泰压缩机冷冻油输送需求
03-24
1236
tiktok shop美区升级发布ace商家经营方法论,全域协同助力商家共赢增长
03-23
1338

上海巧旭高压磁力循环泵定制案例 助力新能源工艺稳定循环运行
03-22
1981

上海巧旭高压磁力齿轮泵定制案例 助力化工企业实现稳定高压输送
03-22
1700
从“养虾热”到实体交互:元萝卜推动openclaw走向真实世界
03-18
1240

黄山良业顺利通过iso50001能源管理体系认证年度监审
03-18
1868

做强品牌,共赢增长!tiktok shop升级发布美区ace商家经营方法论
03-18
1485

上海巧旭定制高粘度磁力转子泵 解决高粘度介质稳定输送难题
03-13
2113

上海巧旭定制高温高压磁力旋涡泵 助力高温高压工况输送凯发平台的解决方案
03-13
2337

万能阀门为环保工程提供衬胶中线蝶阀 d641f型项目配套应用纪实
03-08
2468

万能阀门为化工项目定制美标闸阀 z41h/w型生产交付全流程案例
03-08
2601

上海巧旭高温磁力保温循环泵 贴合工艺需求的定制循环输送方案
03-03
2693